About Your Fish Finder
The fish finder started off as a submarine finder. The recent developments in computing power and microelectronics have resulted in major advances in SONAR development.
I spent a couple of years on new submarine SONAR systems, and this defense level capability has now entered the fishing world. The term SONAR is derived from the words SOund NAvigation Ranging.
This article is extracted from The Fisherman’s Electrical Manual, get your copy today!

HOW DOES SONAR WORK?
A fish finder electrical signal is sent to the transducer. The electrical signal to energize the transducer crystal is generated by an amplifier. The energized crystal reverberates at a particular frequency, to convert the electrical signal into mechanical acoustic or sound energy. The acoustic energy or sound waves causes oscillation of the water molecules through which the sound travels. The sound is pulsed out in a defined beam. These do not travel out in a straight line but in a wave pattern. The acoustic pulse travels through the water at a rate of approximately 4800 ft (1500m) per second in saltwater and 4920 ft/sec in fresh water.
When the energy strikes an object within that beam such as fish, the sea bottom, or a structure then some of the energy is reflected, or echoed back to the transducer. The transducer collects this return, passes it back to the unit and this processes it into display data. As the processor is programmed with the rate of sound transmission in the water it calculates the time difference between the transmission and reception of the returned signal to give a range or depth figure. This result is then displayed as a number or as an image on a screen.
Freshwater and saltwater tends to absorb and scatter sound signals, and the higher frequencies are more susceptible than lower frequencies. Water is frequently being mixed due to environmental factors such as wind and wave actions. The water has air bubbles, suspended materials such as silt, minerals and salts that vary in quantity. There are also micro-organisms that include plankton and algae, all which scatter, absorb and reflect sonar signals.
WHAT ARE YOU LOOKING FOR?
The depth determines the fishing technique, and what type of lure or bait. The finder lets you see who may be at home down there, but it will not guarantee a catch. That part is up to your skills. In most fishing you will use your unit to look for underwater structure, such as tree stumps, ledges and significant bottom changes. Cover consists of underwater object such as tree stumps, weed beds, logs etc. You may also be looking for drop-offs which are gullies and channels or break-lines, which is a sharp bottom drop off point. You may just be looking for fish activity. If you locate a tight ball of baitfish then they are probably being chased by a predator. A loose school indicates no activity.
A finder is not necessarily going to tell you what the fish is. Image interpretation involves understanding both the underwater features and fish behaviour to distinguish between bait fish and the target fish. Distinguishing between the bass and the shad or other species is the angling part.
FISH FINDER FREQUENCIES EXPLAINED
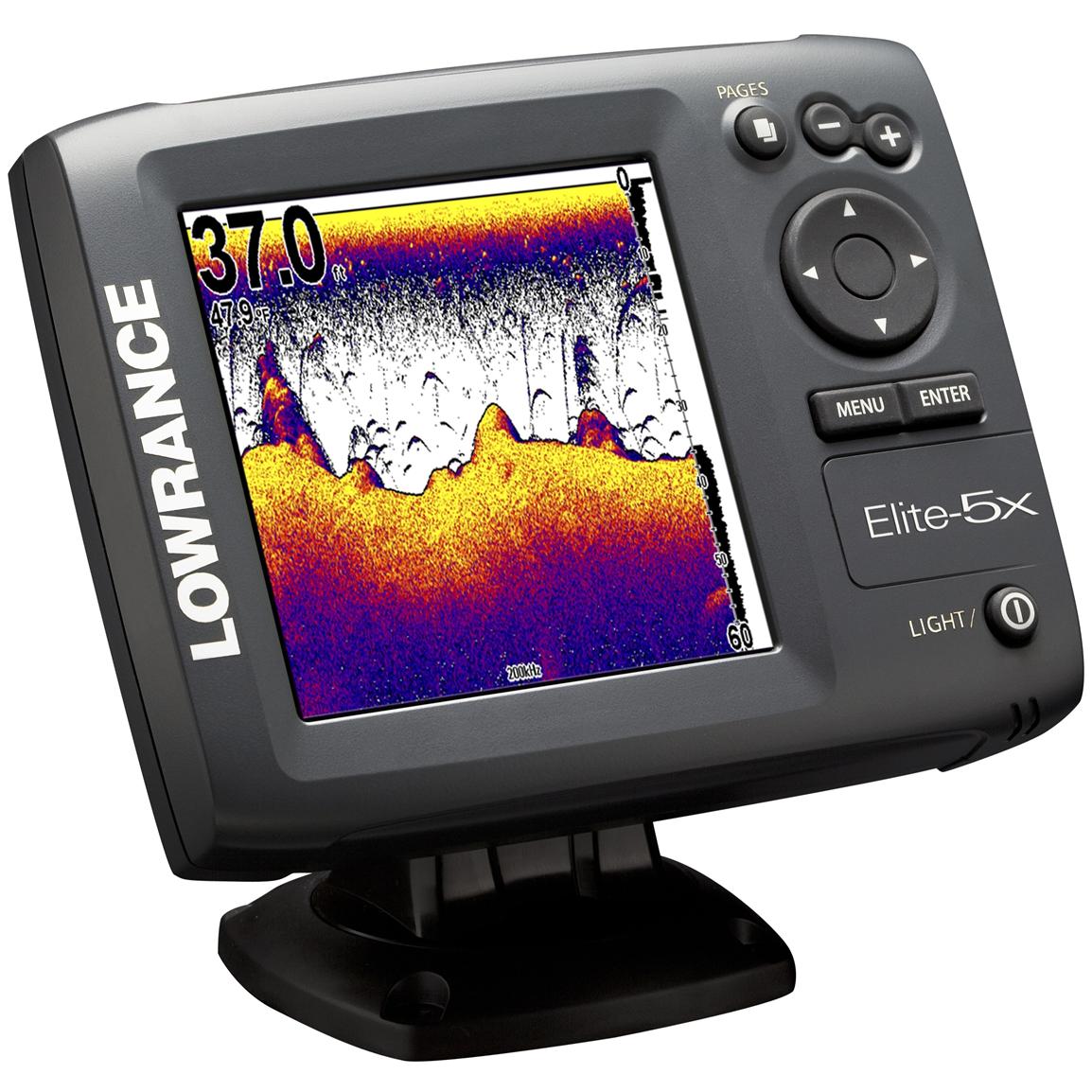
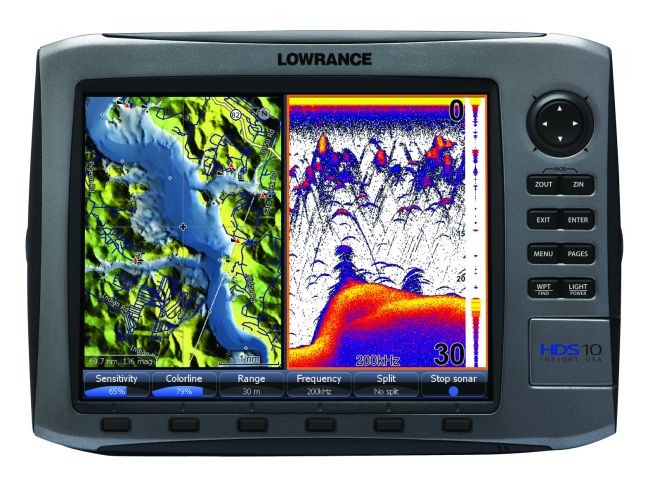
The acoustic transmission frequency affects both the water depth range and the cone angle. The lower frequencies are used in deeper waters and have lower power losses. They also tend to have wider beam angles and cover wider viewing areas. There are many frequencies used in fish-finder sonar systems. Typical are 38, 40, 50, 75, 107, 120, 150, 192, 200, 400, and 455 kHz. Lowrance have a frequency of 192 kHz transducers with either a wide (20°) or narrow (8°) cone angle, and a deepwater one of 50kHz with a 35° cone angle. Simrad units have a user selectable tri-frequency capability of 38/50, 38/200 or 50/200kHz with depth range up to 1800 meters, and have a maximum ping rate of 15 per second. Shallow waters less than 300 feet give the best results with high frequency transducers of 200kHz and wide cone angles up to 20 degrees. In depths greater than 300 feet low frequency transducers of 50kHz with small cone angles of 8 degrees are the best option. Look at the fishfinder options at Westmarine.
WHAT ARE THE FISH FINDER SCREEN CHOICES?
Fish finder displays must be both high resolution and good contrast and are typically in the range of 240 and 320 vertical pixels. Fish-finer displays are also sometimes quoted in pixels per square inch, i.e. 15,170, and the more pixels the better the resolution. Many are happy to have a 160 x 160 pixel unit, however the image is a lot sharper with a 240 x 240 pixel screen, and some Grayscale screens have 480 x 350 pixels. Some new fish-finder units come up to 400 x 400 pixels. If you have a 240 pixel unit set at 240 feet then each foot of depth will equal one pixel. Strong returns will also switch on the adjacent pixels to give a larger image. You may get small images all the way up the column which can be caused by small fish, debris and noise.
The full color VGA TFT screens from Lowrance have pixel resolutions of 640 x 480. Humminbird have what they call a high resolution Grayscale Liquid Paper Graph (LPG). Some units have high-resolution displays in 8 or 16 colors on a 10.4-inch TFT LCD display. Color displays use up to 16 colors for different signal strengths. The stronger ones are displayed in red, and weaker signals as green or blue, for example baitfish schools are generally in blue or green, with larger game fish being yellow, orange or red. The seabed and wrecks are usually displayed as dark orange or red.
READ THE INSTRUCTION AND OPERATION MANUALS!
Many fish finder problems are simply incorrect operation. Read the manual and practice using the fish- finder. Understand how to navigate through the various menus and options. If you have lost the fish finder manuals you can get most off websites. Lowrance, Eagle, Raymarine, Garmin, Simrad and Humminbird have most available for free download.
TROUBLESHOOTING FISH FINDERS
Troubleshooting entails reading the manual and determining whether settings are correct and operating procedures are also correct. Go into the settings or options menu and ensure settings are on auto or defaulting to the factory settings.
The finder will not start up
1. This is generally caused by loss of supply so check supply switches and fuses. Check any supply circuit connections. Check for any corrosion at the in-line fuse which causes high resistance and at the power connection plug pins. It may show okay when testing but when on load and fish-finder is on, the high resistance creates a voltage drop
2. Check that plug is properly inserted, and also check that pins are not damaged or broken.
3. Check supply cables are not damaged. Look for cable nicks or cuts. If all is found to be okay with power checked at plug then the sounder switch is faulty. Use caution when straightening bent pins, they break easily. Check all connectors and connector pins for damage, and that they are straight and not bent. If straightening the pins there is a risk of breakage as they are brittle. Connectors not properly inserted or tightened up are prone to saltwater ingress and corrosion
The fish finder has poor resolution or range
If bottom images are poorly defined or performance has degraded, or fish do not appear to be detected check the transducer. If the transducer is not directed straight down and is angled this can reduce performance. Make an interference check. Check that the water depth you are fishing in is within the sounders nominal depth range. Check the power supply is correct, lower voltages due to poor connections or low battery can affect the unit. If the transducer is the inboard type, check that this has not deteriorated. Make some water surrounds the transducer to displaced any air bubbles that may have formed. Look after your fish finder.
